Robot awtomatlaşdyrmasy üçin bilelikdäki pnewmatik iki barmakly ýumşak tutujy wakuum generatory



Robot awtomatlaşdyrmasy üçin bilelikdäki pnewmatik iki barmakly ýumşak tutujy wakuum generatory
Esasy kategoriýa
Senagat robot goly / Bilelikdäki robot goly / Elektrik tutujy / Akylly hereketlendiriji / Awtomatlaşdyrma çözgütleri
Programma

SCIC Z-EFG seriýaly robot tutujylary kiçi ölçegli bolup, içine gurlan serwo ulgamy bilen üpjün edilen, bu bolsa tizligi, ýagdaýy we gysyş güýjüni takyk dolandyrmaga mümkinçilik berýär. Awtomatlaşdyrma çözgütleri üçin SCIC öňdebaryjy tutujy ulgamy size hiç haçan mümkin däl diýip pikir eden wezipeleri awtomatlaşdyrmak üçin täze mümkinçilikleri açmaga mümkinçilik berer.
Aýratynlyk
·Uly urgusy
· Sazlanyp bilinýän gysyş güýji we sazlanyp bilinýän urgy
·Uzak ömür: on millionlarça sikl, howa penjelerinden has köp
· Içinde gurlan kontroller: kiçi ölçegli, aňsat integrasiýa
·EIA485 şinasynyň dolandyryşy, giriş/çykyş
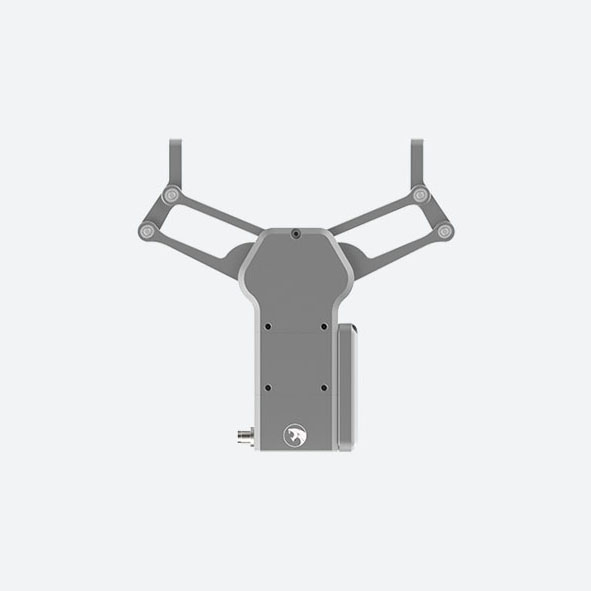
Gysgyç güýji: 40-130N, 120 mm urgyly elektrik tutujynyň Y şekili
Uzyn zarba
Umumy urgusy: 120 mm
Dolandyryş Režimi
485 Modbus, EIA485, Awtobus gözegçiligi
Gysyşdyryjy güýç
Gysyşdyryjy güýç 40-130N sazlanyp bilner
Içerde kontroller
Kiçi meýdany konwertasiýa etmek, integrasiýa etmek aňsat
Takyklyk gözegçiligi
Gaýtalanýanlyk: ±0.02mm
Ýumşak gysgyç
Ol ejiz we deformasiýa bolýan zatlary gysyp bilýär

● Hytaýda ilkinji gezek integrasiýa edilen serwo ulgamy bolan elektrik tutujysy bolan pnewmatik tutujylaryň elektrik tutujylary bilen çalşyrylmagynda rewolýusiýany öňe sürmek.
● Howa kompressory + süzgüç + solenoid klapan + drossel klapan + pnewmatik tutujy üçin ajaýyp çalşyk
● Köp siklli hyzmat möhleti, däp bolan ýapon silindrine laýyk gelýär



Spesifikasiýa parametri
| Model belgisi Z-EFG-130 | Parametrler |
| Jemi insult | 120 mm |
| Tutuş güýji | 40-130N |
| Gaýtalanýanlyk | ±0.02mm |
| Maslahat berilýän tutuş agramy | Maksimum 1 kg |
| Transmissiýa re mode | Wint gaýka + baglanyşyk |
| Hereket edýän bölekleriň ýag bilen doldurylmagy | Her alty aýda ýa-da 1 million hereket / gezek |
| Bir taraplaýyn urma hereket wagty | 0.9s |
| Işleýiş temperaturasynyň diapazony | 5-55℃ |
| Işleýän çyglylyk diapazony | RH35-80(Aýaz ýok) |
| Hereket režimi | Baglanyşyk |
| Strok gözegçiligi | Sazlanyp bolýan |
| Gysyşdyryjy güýji sazlamak | Sazlanyp bolýan |
| Agram | 0.8 kg |
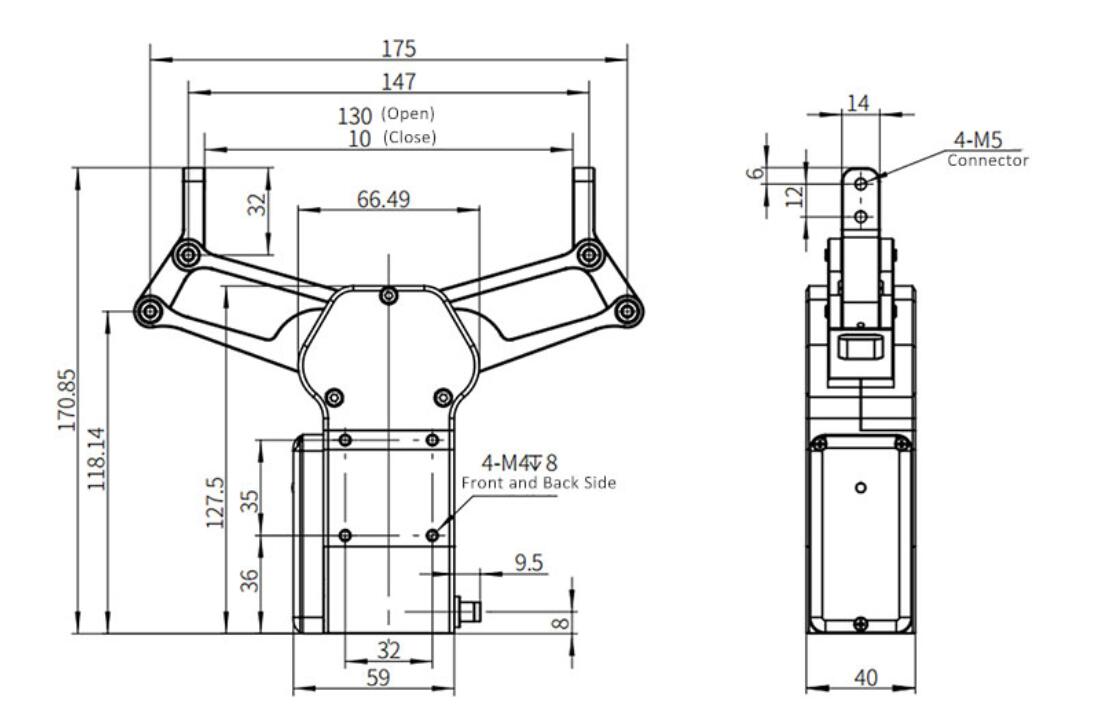
| Ölçegler(U*Ç*B) | 171*187*40mm (açyk) 218*66.5*40m (ýapyk) |
| Kontrolleriň ýerleşdirilişi | Içinde gurlan |
| Güýç | 10W |
| Motoryň görnüşi | DC çotgasyz |
| Iň ýokary tok | 2A |
| Nominal naprýaženiýe | 24V |
| Garaşma tok | 0.4A |
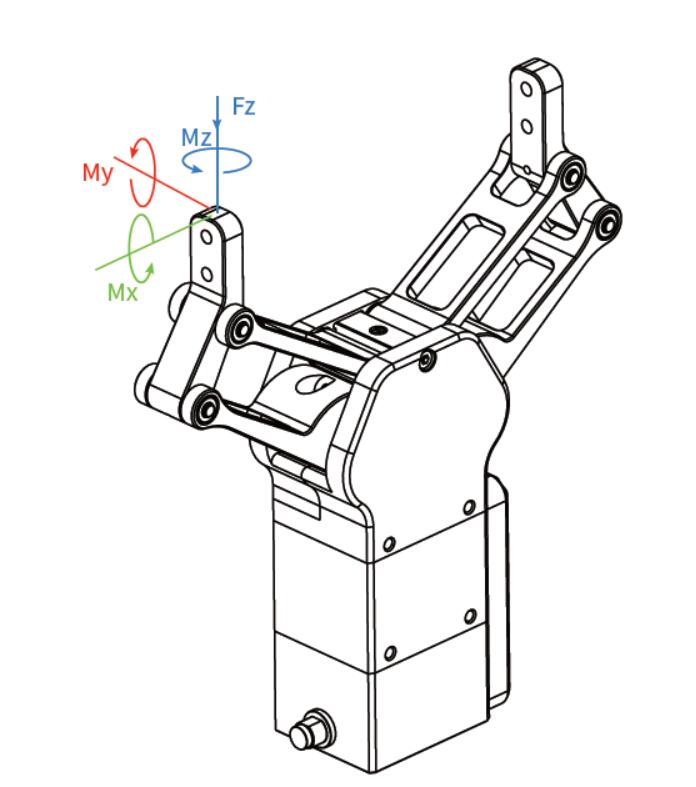
| Dik ugurda rugsat berilýän statik ýük | |
| Fz: | 200N |
| Rugsat berlen moment | |
| Mx: | 2 Nm |
| Meniň: | 2 Nm |
| Mz: | 2 Nm |
Plug and Play, Integrasiýa üçin amatly
Z-EFG-130 elektrik tutujysy hyzmatdaşlykly robot goly bilen utgaşykly bolup biler we onuň içinde serwo ulgamy bar, diňe bir tutujy kompressor + süzgüç + solenoid klapan + gaz klapan + howa tutujysyna deň bolup biler.


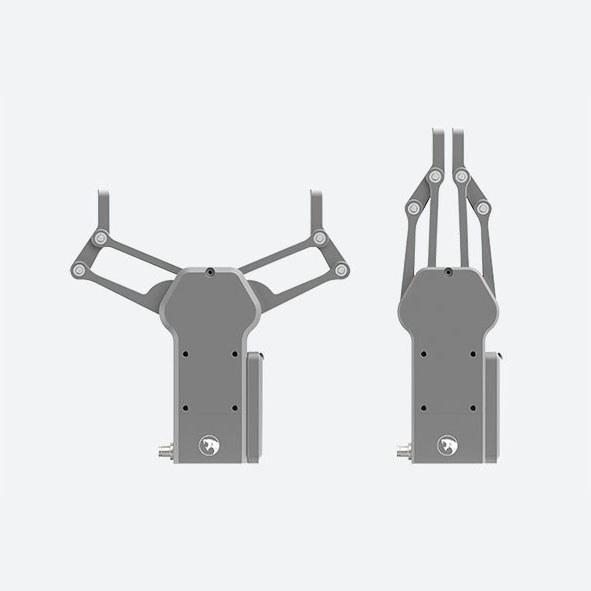
Uzak hereket, ajaýyp utgaşyklyk
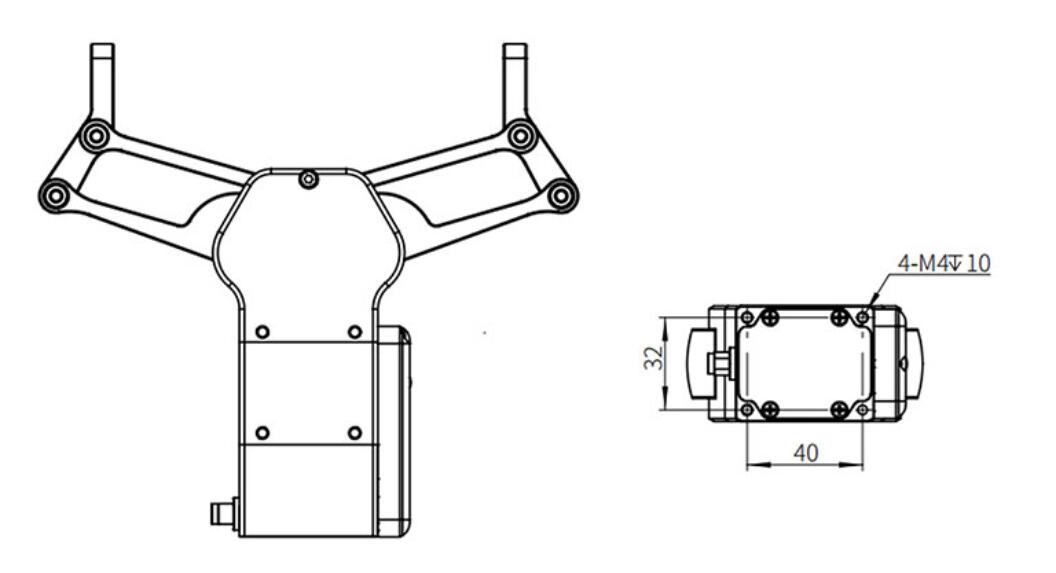
Elektrik tutujynyň netijeli urşy 120 mm-e çenli bolup biler, onuň ýapylýan ölçegi 10 mm, elektrik tutujy ýarymgeçiriji çip, 3C elektronika we beýleki takyk senagat pudaklarynda we ş.m. ulanylyp bilner.
Kiçi ölçegli, birleşdirmäge amatly

Z-EFG-130-yň açylyş ölçegi 171 * 187 * 40 mm, ýapylýan ölçegi 218 * 66.5 * 40 mm, ol ykjam gurluşly, köp sanly gurnama görnüşlerini goldaýar, içinde kontroller bar, kiçi meýdan örtülen.

Takyklyk güýjüniň gözegçiligi
Elektrik tutujy ýörite geçirijilik dizaýnyny we hereketlendiriji algoritm kompensasiýasyny ulanmak üçin niýetlenendir, gysyş güýji 40-130N sazlanyp bilner, teklip edilýän gysyş agramy ≤1kg we ± 0.02mm gaýtalanmagy amala aşyryp biler.
Adaptiw Tutuş, Guýrugy Üýtgedilip Bilýän

Z-EFG-130 elektrik tutujysy adaptiw gysmagy goldaýar, tegelek, sferiki ýa-da ýörite görnüşli obýektler üçin has amatlydyr, onuň guýruk böleklerini aňsatlyk bilen üýtgedip bolýar, müşderiler obýektleri öz talaplaryna görä gysyp bilýärler.


Köpeltmek üçin dolandyryş režimleri, ulanmak aňsat

Elektrik tutujyny Modbus takyklyk bilen dolandyryp bolýar, onuň konfigurasiýasy ýönekeý, sanly giriş/çykyş aragatnaşyk protokolyny ulanmak üçin diňe bir kabel gerek, ol PLC esasy dolandyryş ulgamy bilen utgaşykly.
Ýük agyrlyk merkeziniň çalşygy
Biziň işimiz


Önümleriň kategoriýalary
-

Bäsdeşlikli Bahaly Senagat Roboty 6 Okly Manipulýator...
-

Senagatyň ýokary tizlikli ýumurtgaly miwe saýlamagy we ýerleşdirmegi 4 ...
-

Dobot alty okly hyzmatdaşlyk robot gol artikulýatory...
-

Uzyn Robotik Golly Goşun Teleskopik Manipulýatory 20...
-
Gyzgyn Satyş Robot Gol Metal 6-Okly Mehaniki Robot ...
-

Senagat maşyny robot goly 4 okly manipulýator...