HITBOT ELEKTRIK GAPLAÝJY SERIA – Z-EFG-26 Parallel Elektrik Gaplaýjy



Esasy kategoriýa
Senagat robot goly / Bilelikdäki robot goly / Elektrik tutujy / Akylly hereketlendiriji / Awtomatlaşdyrma çözgütleri
Programma
SCIC Z-EFG seriýaly robot tutujylary kiçi ölçegli bolup, içine gurlan serwo ulgamy bilen üpjün edilen, bu bolsa tizligi, ýagdaýy we gysyş güýjüni takyk dolandyrmaga mümkinçilik berýär. Awtomatlaşdyrma çözgütleri üçin SCIC öňdebaryjy tutujy ulgamy size hiç haçan mümkin däl diýip pikir eden wezipeleri awtomatlaşdyrmak üçin täze mümkinçilikleri açmaga mümkinçilik berer.

Aýratynlyk
·Gapjygyň düşüşini anyklamak, meýdany çykarmak funksiýasy
· Güýji, ýerleşýän ýeri we tizligi Modbus arkaly takyk dolandyryp bolýar
·Uzak ömür: on millionlarça sikl, howa penjelerinden has köp
· Içinde gurlan kontroller: kiçi meýdan, aňsat integrasiýa
·Dolandyryş režimi: 485 (Modbus RTU), giriş/çykyş
Gysyşdyryjy güýç we tizlik Modbus tarapyndan dolandyrylyp bilinýän takyklyk bolup biler
Köp sanly programma
Ol gysyşdyryjy düşüş anyklaýyş we etrap çykyşyna eýedir
Dolandyryşda takyklyk
Gysgyç güýji, ujy, tizlik Modbus tarapyndan dolandyrylyp bilner
Uzak ömür
Howa tutujysynyň üstünden on million welosiped
Içerki kontroller
Kiçi meýdany eýeleýär, integrasiýa etmek üçin amatly.
Reaksiýa bildirmek üçin çalt
Bir gezek urmagyň iň gysga wagty bary-ýogy 0,25 sekunt
Ýumşak gysgyç
Ol ýumurtga, aýna käse ýaly näzik zatlary gysyp bilýär.




Spesifikasiýa parametri
Z-EFG-26 elektrik 2 barmakly parallel tutujy bolup, ölçegi kiçi, ýöne ýumurtga, turba, elektron bölekleri ýaly köp ýumşak zatlary tutmakda güýçli.
● Z-EFG-26 elektrik tutujysynyň içine gurlan dolandyryjysy bar.
●Onuň urşy we gysyş güýji sazlanyp bilner.
●Terminallary dürli talaplara uýgunlaşdyrmak üçin çalşyryp bolýar.
●Ýumurtgalar, synag turbalary, halkalar we ş.m. ýaly näzik we deformasiýa bolýan zatlary aňsatlyk bilen ýygnaň.
●Howa çeşmeleri bolmadyk sahnalar (laboratoriýalar we hassahanalar ýaly) üçin amatly.
| Model belgisi Z-EFG-26 | Parametrler |
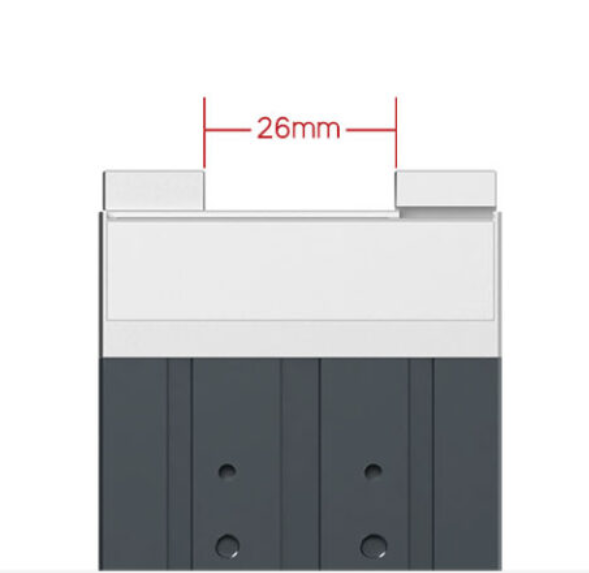
| Jemi insult | 26mm |
| Tutuş güýji | 6~15N |
| Gaýtalanýanlyk | ±0.02mm |
| Maslahat berilýän agram | Maksimum 0.3 kg |
| Transmissiýa re mode | Dişli reýka + Çapraz rulon ýol görkezijisi |
| Hereket edýän bölekleriň ýag bilen doldurylmagy | Her alty aýda ýa-da 1 million hereket / gezek |
| Bir taraplaýyn urma hereket wagty | 0.25s |
| Işleýiş temperaturasynyň diapazony | 5-55℃ |
| Işleýän çyglylyk diapazony | RH35-80(Aýaz ýok) |
| Hereket režimi | Iki barmak gorizontal hereket edýär |
| Strok gözegçiligi | Sazlanyp bolýan |
| Gysyşdyryjy güýji sazlamak | Sazlanyp bolýan |
| Agram | 0,45 kg |
| Ölçegler(U*Ç*B) | 55*26*97mm |
| Kontrolleriň ýerleşdirilişi | Içinde gurlan |
| Güýç | 10W |
| Motoryň görnüşi | DC çotgasyz |
| Iň ýokary tok | 1A |
| Nominal naprýaženiýe | 24V |
| Garaşma tok | 0.4A |
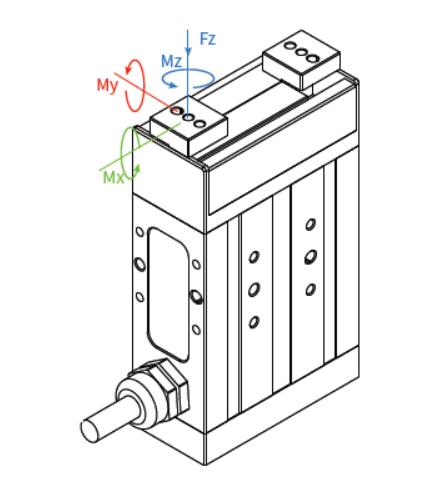
| Dik ugurda rugsat berilýän statik ýük | |
| Fz: | 250N |
| Rugsat berlen moment | |
| Mx: | 2.4 Nm |
| Meniň: | 2.6 Nm |
| Mz: | 2 Nm |
Takyk Güýç Gözegçiligi Gaýtalamak Takyklygy

Elektrik tutujy kompensasiýa üçin ýörite geçirijilik dizaýnyny we sürüjilik hasaplamasyny ulandy, onuň umumy urşy 26 mm, gysyş güýji 6-15N, urşy we gysyş güýjüni sazlap bolýar we gaýtalanmagy ±0.02 mm.
Çalt reaksiýa, has durnukly

Bir gezek urmagyň iň gysga wagty bary-ýogy 0,25 sekunt, ol önümçilik liniýasy üçin çalt we durnukly gysyş talabyny kanagatlandyryp biler.
Kiçi Fgure, aralaşmak aňsat

Z-EFG-26-nyň ölçegi L55*W26*H97mm, gurluşy ykjam, bäşden gowrak çeýe gurnama režimini goldaýar, kontroller gurlan, kiçi ýer tutýar, dürli gysgyç talaplary üçin köp işleri aňsatlyk bilen ýerine ýetirip bilýär.

Integrasiýalaşdyrylan sürüji we dolandyryjy ýumşak gysgyç

Elektrik tutujynyň guýruk bölegini aňsatlyk bilen üýtgedip bolýar, onuň gysyjy agramy 300g, müşderiler elektrik tutujynyň gysyjy wezipelerini iň ýokary derejede ýerine ýetirip bilmegi üçin tutujynyň guýruk bölegini öz gysyjy obýektlerine laýyk getirmek üçin ýörite dizaýn edip bilerler.
Köpeltmek-Dolandyryş Režimleri, Işletmek Aňsat

Z-EFG-26 tutujysynyň konfigurasiýasy ýönekeý, onuň köp sanly dolandyryş režimi bar: 485 (Modbus RTU), Impuls, Giriş/Çykyş, ol PLC esasy dolandyryş ulgamy bilen utgaşykly.

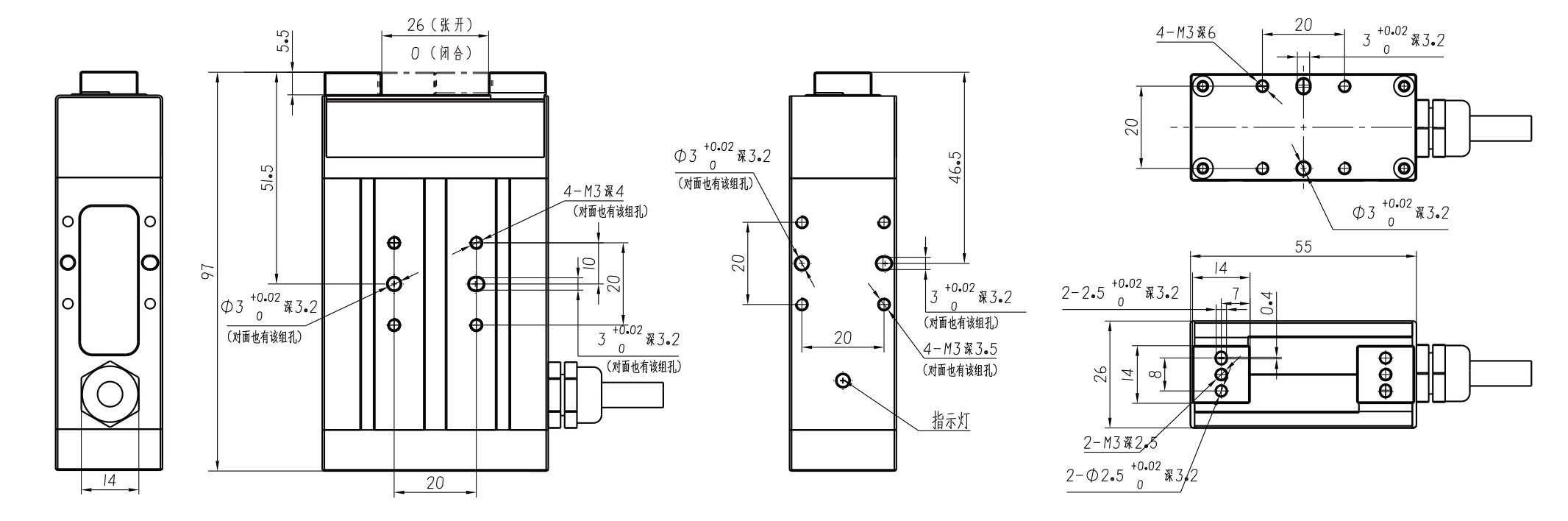
Ölçegleriň gurnama diagrammasy
Biziň işimiz


Önümleriň kategoriýalary
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER PGS SERIÝASY –...
-

HITBOT ELEKTRIK GAPJYK SERIÝASY – Z-EFG-C6...
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER RGI SERIÝASY –...
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER RGI SERIÝASY –...
-

HITBOT ELEKTRIK GAPJYK SERIÝASY – Z-EFG-20P Para...
-

GRIPPER MODUL SERIÝASY – FPT Iki barmakly T...