HITBOT ELEKTRIK GAPJYK SERIÝASY – Z-EFG-C35 Bilelikdäki Elektrik Gapjy




Esasy kategoriýa
Senagat robot goly / Bilelikdäki robot goly / Elektrik tutujy / Akylly hereketlendiriji / Awtomatlaşdyrma çözgütleri
Programma
SCIC Z-EFG seriýaly robot tutujylary kiçi ölçegli bolup, içine gurlan serwo ulgamy bilen üpjün edilen, bu bolsa tizligi, ýagdaýy we gysyş güýjüni takyk dolandyrmaga mümkinçilik berýär. Awtomatlaşdyrma çözgütleri üçin SCIC öňdebaryjy tutujy ulgamy size hiç haçan mümkin däl diýip pikir eden wezipeleri awtomatlaşdyrmak üçin täze mümkinçilikleri açmaga mümkinçilik berer.

Aýratynlyk

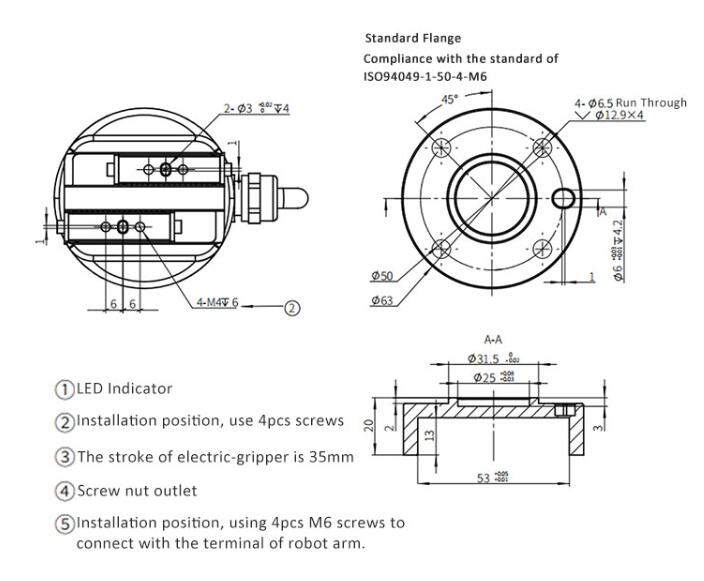
·Gapjygyň düşüşini anyklamak, meýdany çykarmak funksiýasy
· Güýji, ýerleşýän ýeri we tizligi Modbus arkaly takyk dolandyryp bolýar
·Uzak ömür: on millionlarça sikl, howa penjelerinden has köp
· Içinde gurlan kontroller: kiçi meýdan, aňsat integrasiýa
·Dolandyryş režimi: 485 (Modbus RTU), giriş/çykyş
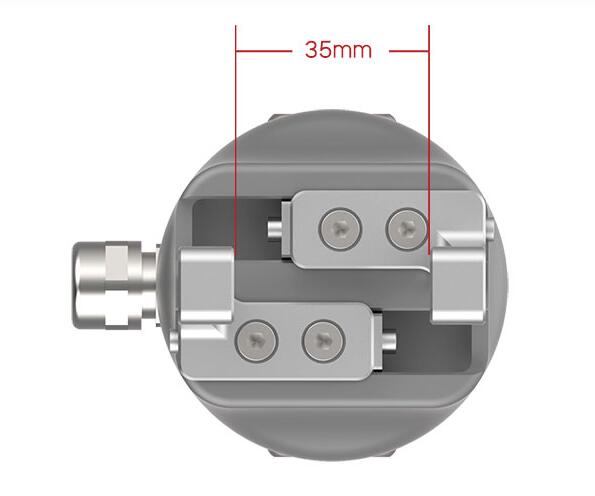
Uruş 35 mm, gysyş güýji 50N. Ol 6 okly robot goly bilen utgaşykly.
Ýokary ýygylyk
Iň gysga urma wagty 0,5s
Ýokary takyklyk
Gaýtalanýanlyk ±0.03 mm
Ýokary ýük
Maslahat berilýän gysgyç agramy ≤1kg
"Plug and Play"
6 okly robot üçin ýörite elektrik tutujy
Guýrugy üýtgedilip bilner
Onuň guýruk ujy dürli talaplara laýyk gelmek üçin üýtgedilip bilner
Ýumşak gysgyç
Ol ejiz we deformasiýa edilen zatlary gysyp bilýär

● Hytaýda ilkinji gezek integrasiýa edilen serwo ulgamy bolan elektrik tutujysy bolan pnewmatik tutujylaryň elektrik tutujylary bilen çalşyrylmagynda rewolýusiýany öňe sürmek.
● Howa kompressory + süzgüç + solenoid klapan + drossel klapan + pnewmatik tutujy üçin ajaýyp çalşyk
● Köp siklli hyzmat möhleti, däp bolan ýapon silindrine laýyk gelýär



Spesifikasiýa parametri
| Model belgisi Z-EFG-C35 | Parametrler |
| Umumy urgusy | 35 mm sazlanyp bilýän |
| Tutuş güýji | 15-50N sazlanyp bilýän |
| Gaýtalanýanlyk | ±0.03mm |
| Maslahat berilýän agram | ≤1kg |
| Geçiriş tertibi | Dişli çarh + Sferik ýol görkeziji |
| Hereket edýän bölekleriň ýag bilen doldurylmagy | Her alty aýda ýa-da 1 million hereket / gezek |
| Bir taraplaýyn urma hereket wagty | 0,5s |
| Hereket režimi | Iki barmak gorizontal hereket edýär |
| Agram | 0,5 kg |
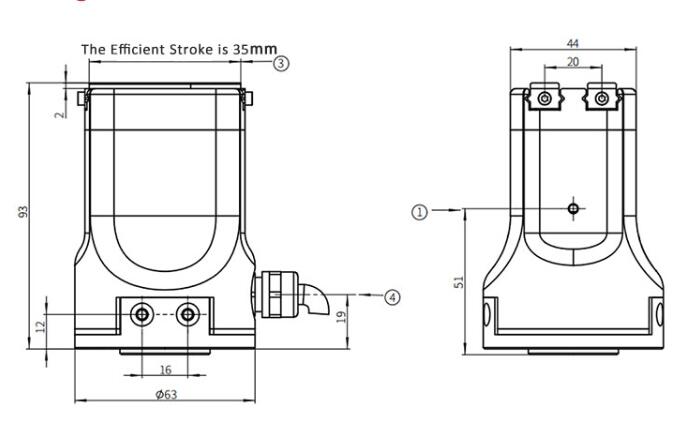
| Ölçegler (Uzynlyk*Iňlik*B) | 63*63*95mm |
| Işleýiş naprýaženiýesi | 24V±10% |
| Nominal tok | 0.3A |
| Iň ýokary tok | 1A |
| Güýç | 8W |
| Gorag klasy | IP20 |
| Motoryň görnüşi | DC çotgasyz |
| Işleýiş temperaturasynyň diapazony | 5-55℃ |
| Işleýän çyglylyk diapazony | RH35-80 (Aýaz ýok) |

| Dik ugurda rugsat berilýän statik ýük | |
| Fz: | 150N |
| Rugsat berlen moment | |
| Mx: | 2.5 Nm |
| Meniň: | 2 Nm |
| Mz: | 3 Nm |
Içerde sürüjilik we dolandyryjy gurnalan
Z-EFG-C35 elektrik tutujysynyň içine serwo ulgamy goşulandyr, onuň umumy urşy 35 mm, gysyş güýji 15-50N, urşy we gysyş güýji sazlanyp bilner we gaýtalanmagy ±0.03 mm.

Alty okly robot goly bilen utgaşykly

Önüm 6 okly robot goly bilen utgaşykly, birikdirip-işletmegi amala aşyrmak üçin iň gysga urma wagty bary-ýogy 0,5 sekunt, önümçilik liniýasy üçin çalt we durnukly gysyş talabyny kanagatlandyrmak üçin.
Kiçi ölçegli, gurnamaga çeýe

Z-EFG-C35 önüminiň ölçegi diňe L63*W63*H95mm, kiçi we dar gurşawda gurnamak mümkin.


Çalt reaksiýa, güýç gözegçiligi üçin takyklyk

Onuň hereket görnüşi 2 barmakly parallel, suw geçirmeýän IP20, terminalynyň gysgyç böleginiň islendik wagt üýtgedilip bilner, müşderiler gysgyçy önümçilik talabyna laýyklykda sazlap bilerler.
Köpeltmek üçin dolandyryş režimleri, ulanmak aňsat

Z-EFG-C35-iň konfigurasiýasy ýönekeý, köp sanly dolandyryş režimleri, şol sanda 485 (Modbus RTU), Pulse, I/O we PLC esasy dolandyryş ulgamy bilen utgaşykly.

Ýük agyrlyk merkeziniň çalşygy
Biziň işimiz


Önümleriň kategoriýalary
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER PGE SERIÝASY –...
-
-300x2551-300x300.png)
DH ROBOTICS SERVO ELEKTRIK GRIPPER PGSE SERIÝASY ...
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER CG SERIÝASY – ...
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER PGE SERIÝASY –...
-

HITBOT ELEKTRIK GAPJYK SERIÝASY – Z-EFG-13...
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER CG SERIÝASY – ...