Imako gündelik himiki maddalar, azyk we içgi senagaty üçin gaplamak we paletlemek üçin bir golly hyzmatdaşlyk roboty


Imako gündelik himiki maddalar, azyk we içgi senagaty üçin gaplamak we paletlemek üçin bir golly hyzmatdaşlyk roboty
Esasy kategoriýa
AGV AMR / jek galdyryjy AGV AMR / AGV awtomatik dolandyrylýan ulag / AMR awtonom ykjam robot / Senagat materiallaryny gaýtadan işlemek üçin AGV AMR awtoulagy / Hytaý öndürijisi AGV robot / ammar AMR / AMR jek galdyryjy lazer SLAM nawigasiýasy / AGV AMR ykjam robot / AGV AMR şassi lazer SLAM nawigasiýasy / akylly logistika roboty
Senagatyň gaplama we işleme proseslerinde düýpli özgerişlik döretjek rewolýusiýa çözgüdi bolan senagat palletleşdirme, torbalama we gutu gaplama robotlaşdyryjy elini tanyşdyrýarys. Bu öňdebaryjy robotlaşdyryjy el torbalaryň, gutularyň we gaplamalaryň howpsuz we ygtybarly işlenilmegini üpjün etmek bilen birlikde netijeliligi we öndürijiligi ýokarlandyrmak üçin niýetlenendir.
Önümçilikde we logistikada tizlige we takyklyga bolan zerurlyk artýarka, senagat palletleşdirme, üst-üste goýma, sumka we gaplama üçin robotlaşdyrylan robot ellerimiz iň gowy çözgüt bolup durýar. El zähmetiniň we adam ýalňyşlygynyň töwekgelçiliginiň günleri geçdi. Bu ösen robot el ähli görnüşli sumkalary, gutulary we gaplamalary aňsatlyk bilen palletleşdirmäge, üst-üste goýmaga we işletmäge programmirlenýär, bu bolsa minimal iş wagtynda bökdençsiz işlemegi üpjün edýär.
Senagatda ulanylýan, palletleşdirýän, sumkalary we gutulary ýerleşdirýän we gaplaýan robotlaşdyrylan el, ony däp bolan usullardan tapawutlandyrýan deňsiz-taýsyz aýratynlyklaryna eýedir. Robotlaşdyrylan el, takyk we yzygiderli hereketi üpjün etmek, işlenilýän önümleriň nädogry işlemeginiň ýa-da zaýalanmagynyň mümkinçiligini aradan aýyrmak üçin iň täze sensorlar we tehnologiýalar bilen enjamlaşdyrylandyr. Onuň ýokary tizlikli mümkinçilikleri, dürli görnüşleri we ölçegleri takyk anyklamak we sazlamak ukyby bilen utgaşdyrylyp, gaplama amallarynyň tizligini we netijeliligini ep-esli ýokarlandyrýar.
Mundan başga-da, bu robot goly örän köpugurly bolup, ony dürli pudaklar üçin amatly edýär. Azyk gaýtadan işlemekden derman senagatyna, ammardan önümçilike çenli, bu robot çözgüdi dürli gurşawlara we işlere aňsatlyk bilen uýgunlaşyp bilýär. Dürli agramdaky sumkalary gaýtadan işlemek, gutulary takyklyk bilen üst-üste goýmak ýa-da önümleri üns bilen gaplamak bolsun, biziň senagat palletleşdirýän, üst-üste goýýan we gutu gaplaýan robot ellerimiz ajaýyp çözgütdir.
Gysgaça aýdylanda, Senagat Paletleşdiriji Torba Gutusyny Gaplamak Robot Elini Senagat Gaplamak we Gaýtadan Işlemek Dünýäsinde üýtgeşik bir zatdyr. Ösen aýratynlyklary, deňsiz-taýsyz netijeliligi we köpugurlylygy bilen bu rewolýusiýa çözgüdi önümçiligi ep-esli ýokarlandyrmak, zähmet çykdajylaryny azaltmak we önümiň howpsuzlygyny üpjün etmek arkaly pudagy täzeden kemala getirer. Bäsdeşliklerden öňde boluň we öňdebaryjy robot ellerimiz bilen senagat awtomatlaşdyryşynyň geljegine goşulyň.
Programma

AMB seriýaly pilotsuz şassi agv awtonom ulagy üçin AMB (Awtomobil Göçme Bazasy), agv awtonom dolandyrylýan ulaglar üçin niýetlenen uniwersal şassi, kartany redaktirlemek we lokalizasiýa nawigasiýasy ýaly käbir aýratynlyklary hödürleýär. agv arabasy üçin bu pilotsuz şassi, ulanyjylara agv awtonom ulaglarynyň önümçiligini we ulanylyşyny çalt tamamlamaga kömek etmek üçin dürli ýokarky modullary, şeýle hem güýçli klient programma üpjünçiligini we dispetçer ulgamlaryny gurnamak üçin giriş/çykyş we CAN ýaly giň gerimli interfeýsleri hödürleýär. agv awtonom dolandyrylýan ulaglar üçin AMB seriýaly pilotsuz şassisiniň ýokarsynda dört sany gurnama deşigi bar, bu bolsa bir şassiden köp sanly ulanylyşa ýetmek üçin domkrat, rolikler, manipulýatorlar, gizlin çekiş, displeý we ş.m. bilen özbaşdak giňeltmegi goldaýar. AMB, SEER Enterprise Enhanced Digitalization bilen bilelikde, ýüzlerçe AMB önüminiň bir wagtda bitewi dispetçerleşdirilmegini we ýerleşdirilmegini amala aşyryp biler, bu bolsa zawodda içerki logistika we ulagyň intellektual derejesini ep-esli gowulandyrýar.
Aýratynlyk
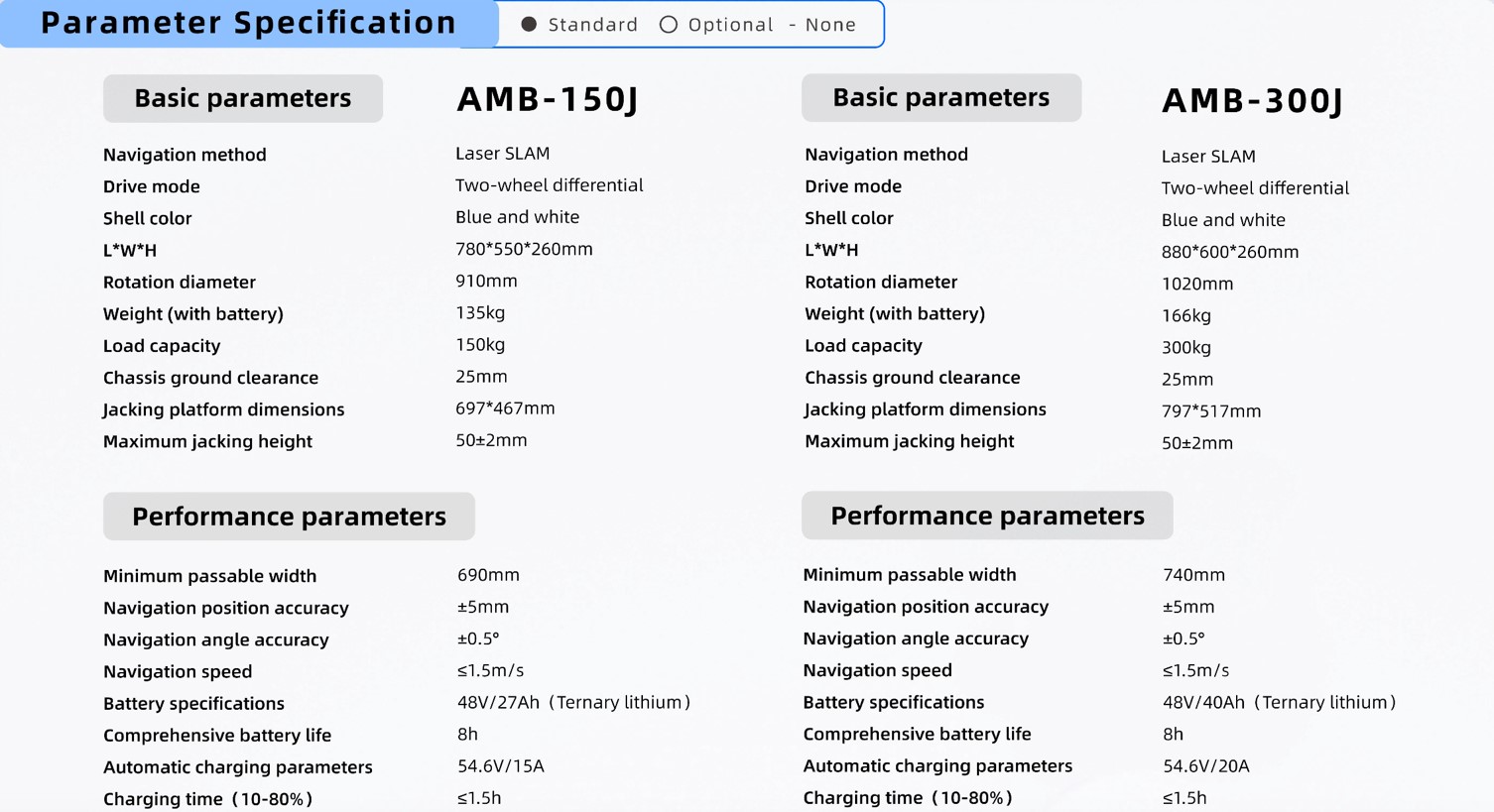
·ýük göterijilik: 150kg we 300kg
·maks. domkrat beýikligi: 50 mm
·nawigasiýa pozisiýasynyň takyklygy: ±5 mm
·nawigasiýa burçynyň takyklygy: ±0.5°
● Islendik wagt elýeterli baý aýratynlyklar
Giňişleýin we ajaýyp standart aýratynlyklar, şeýle hem baý we amaly ösen aýratynlyklar müşderilere akylly logistika ýetmäge aňsatlyk bilen kömek edýär.
● Giňeltmek üçin elýeterli köpugurly platformalar
Dürli pudaklaryň ýük we sahna talaplaryny kanagatlandyrmak üçin 150 kg we 300 kg platformalary üpjün ediň. Şeýle hem, bir şassi bilen köp sanly ulanylyşlary amala aşyrmak üçin ony manipulýatorlar, rolikler, domkrat, gizlin dartma, pan/tilt, displeý ekrany we ş.m. bilen ulanyp bolýar.
● ±5 mm, netijeli we takyk
Lazer SLAM algoritmi ýokary takyklykly lokalizasiýa ýetmek üçin ulanylýar, lazer şöhlelendirmeýän gaýtalanýan ýerleşiş takyklygy ±5 mm aralygynda bolup, ykjam robotlar bilen adamlaryň arasynda bökdençsiz doklamany we dürli nokatlaryň arasynda ýükleriň netijeli akymyny üpjün edýär. Bellik: Hakyky gymmatlyklar daşky gurşaw şertlerine baglydyr.
● Howpsuzlyk we ygtybarlylyk üçin durnukly nawigasiýa
Lazerli SLAM nawigasiýasy, lazer şöhlelendiriji nawigasiýasy, QR kod nawigasiýasy we beýleki nawigasiýa usullary ykjam robotyň durnukly işlemegini üpjün etmek üçin ajaýyp utgaşdyrylýar we birkemsiz çalşyrylýar.
● Aňsat ýerleşdirmek we görünýän dolandyryş
Goldaw berýän programma üpjünçiliginiň we sanly ulgamlaryň doly toplumy mobil robotlaryň işini, tertipleşdirişini we maglumatlary dolandyrmagyny aňsatlyk bilen amala aşyryp biler, şeýle hem akylly logistikany hakykatdanam amala aşyrmak üçin zawodyň MES ulgamy bilen üznüksiz baglanyşyp biler.
Baglanyşykly önümler



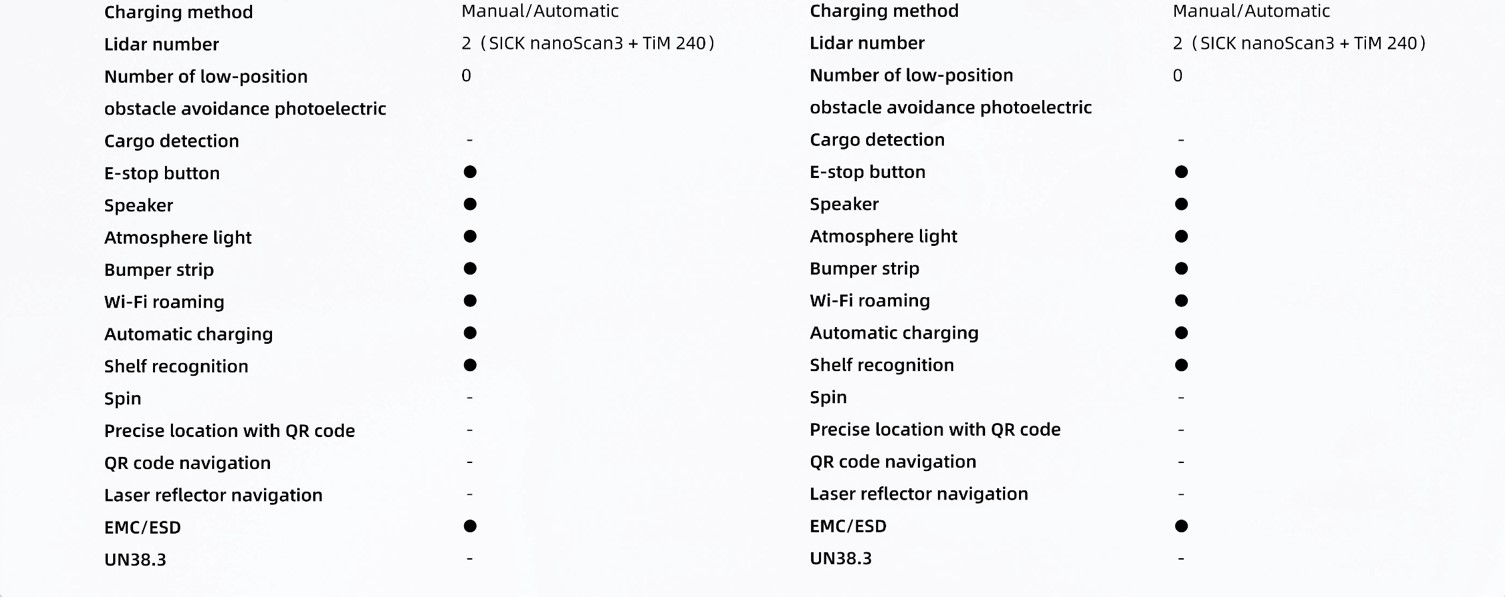
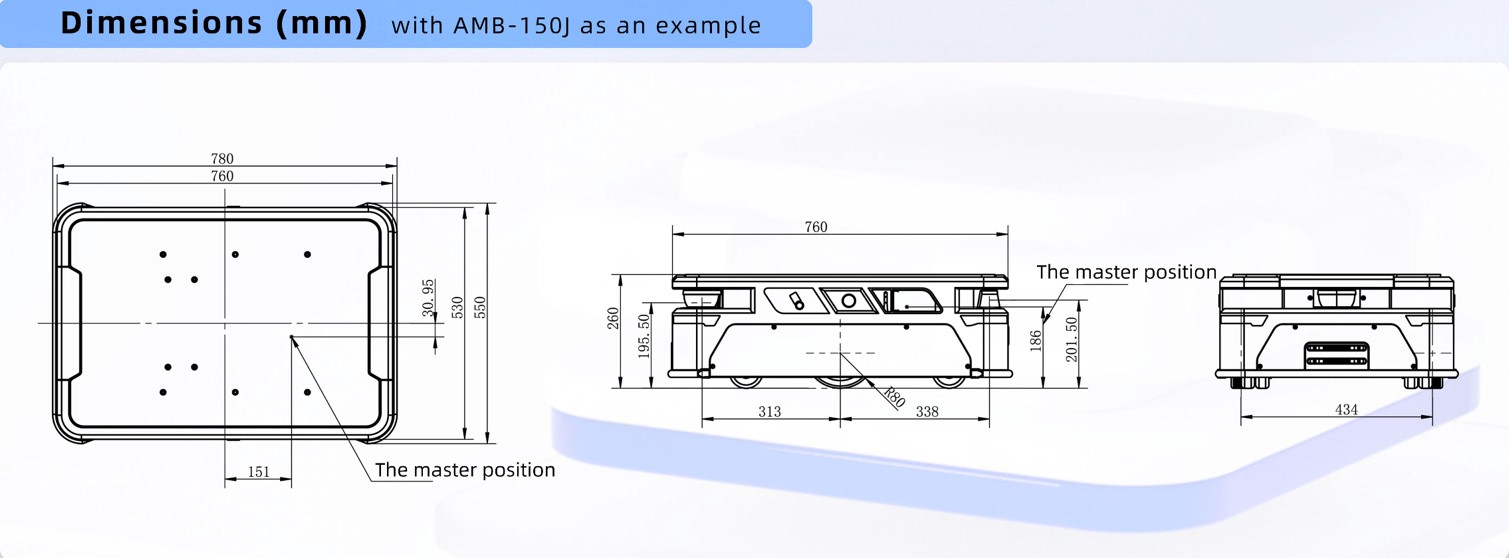
Spesifikasiýa parametri
Biziň işimiz


Önümleriň kategoriýalary
-

Hytaýyň Awtomatiki Senagat 6 Okly Senagat Robo...
-
Akylly Bilelikdäki Senagat Roboty 6 Ok...
-

Senagat Manipulýatory 2 Okly Servo Motor Goly R...
-
Hytaýyň arzan bahadan kebşirleýji 6 okly manipulýator senagaty...
-

6 okly hyzmatdaşlyk roboty el bilen işleýän robot...
-

6 okly ýük göteriji 6 kg kesiji kebşirleme senagatyny işläp bejermek ...