ÇALT ÇALŞYRYJY SERIÝASY – QCA-200-D1 Robotyň ujundaky Çalt Çalşyjy Enjam


Esasy kategoriýa
Robot Gural Çalşyjy / Gol Ujundaky Gural Çalşyjy (EOAT) / Çalt Çalşyş Ulgamy / Awtomatik Gural Çalşyjy / Robot Gural Interfeýsi / Robot Tarapy / Tutujy Tarapy / Gural Çeýeligi / Çalt Çykaryş / Pnewmatik Gural Çalşyjy / Elektrik Gural Çalşyjy / Gidrawlik Gural Çalşyjy / Takyk Gural Çalşyjy / Howpsuzlyk Gulplama Mehanizmi / Ujun Effektory / Awtomatlaşdyrma / Gural Çalşyjy Netijeliligi / Gural Çalşyjy / Senagat Awtomatlaşdyrmasy / Robot Gol Ujundaky Gurallar / Modul Dizaýn
Programma
Goluň ujundaky gurallar (EOAT) awtoulag önümçiligi, 3C elektronika, logistika, inýeksiýa galyplama, azyk we derman gaplamalary we metal gaýtadan işlemek ýaly pudaklarda giňden ulanylýar. Onuň esasy funksiýalaryna iş böleklerini gaýtadan işlemek, kebşirlemek, püskürtmek, barlag geçirmek we gurallary çalt çalşyrmak girýär. EOAT önümçiligiň netijeliligini, çeýeligini we önümiň hilini ep-esli ýokarlandyrýar we ony häzirki zaman senagat awtomatlaşdyryşynyň möhüm bölegine öwürýär.
Aýratynlyk
Ýokary takyklyk
Porşen sazlaýjy tutujy tarapy ýerleşdiriş rolyny oýnaýar, bu bolsa ýokary gaýtalanýan ýerleşdiriş takyklygyny üpjün edýär. Bir million sikl synagy hakyky takyklygyň maslahat berilýän gymmatlykdan has ýokarydygyny görkezýär.
Ýokary berklik
Uly silindr diametri bolan gulplaýjy porşen güýçli gulplaýjy güýje eýedir, SCIC robot uçly çalt enjam güýçli moment garşylyk ukybyna eýedir. Gulplananda, ýokary tizlikli hereket sebäpli titreme bolmaz, şeýlelik bilen gulplanmanyň bozulmagynyň öňüni alýar we gaýtalanýan ýerleşdiriş takyklygyny üpjün edýär.
Ýokary öndürijilik
Signal modulynyň ýakyn gatnaşygyny üpjün etmek üçin köp konus şekilli ýüz dizaýny, uzak ömürli möhürleýji bölekleri we ýokary hilli elastik kontakt zondy bolan gulplaýyş mehanizmi kabul edildi.



Spesifikasiýa parametri
| Çalt üýtgediji seriýa | ||||
| Model | Maksimum ýük | Gaz ýoly | Gulplaýyş güýji@80Psi (5.5Bar) | Önümiň agramy |
| QCA-05 | 5 kg | 6-M5 | 620N | 0.4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0.3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0.3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1.0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1.4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1.7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1.9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5.2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3.7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6.2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9.0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9.0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9.4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23.4 kg |

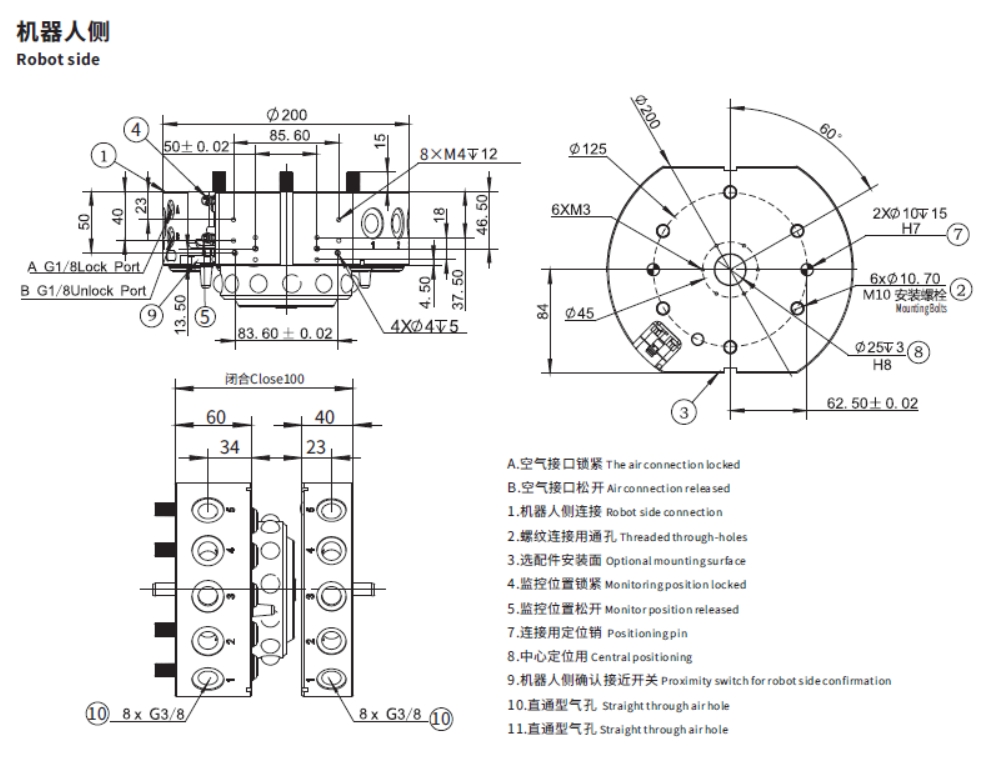
Robot tarapy

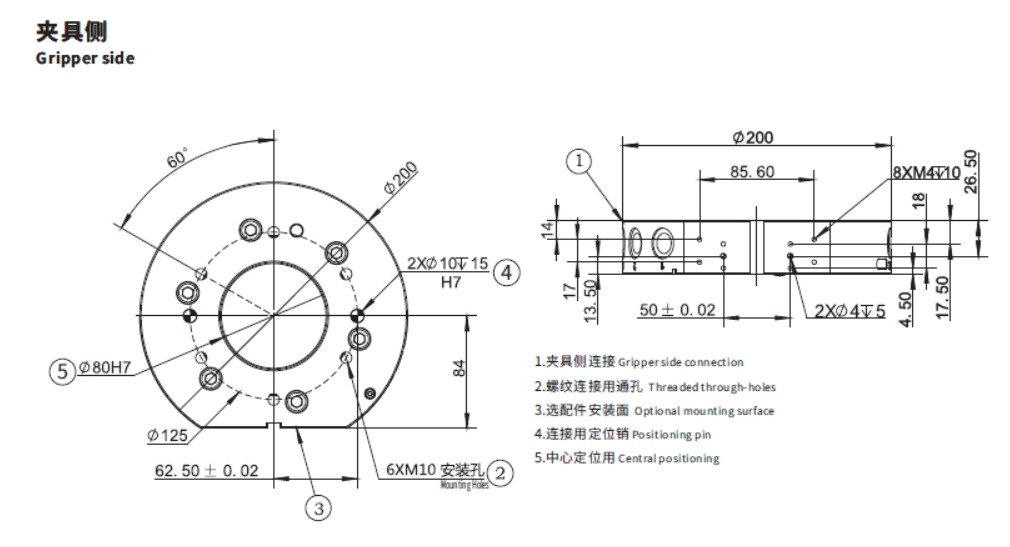
Tutujy tarapy
Degişli Modul
Modul görnüşi
| Önümiň ady | Model | PN | Iş woltažy | Işleýän tok | Birleşdiriji | PN birleşdiriji |
| Robotyň gapdal signal moduly | QCSM-15R2 | 7.Y00468 | 24V | 2.5A | D-Sub15R2-1000① | 1.Y10080 |
| Tutujy tarapdaky signal moduly | QCSM-15G2 | 7.Y00469 | 24V | 2.5A | D-Sub15G2-1000① | 1.Y10081 |
| Robotyň gapdal signal moduly | QCSM-08R | 7.Y00477 | 380V | 30A | 3108A22-23S② | 1.Y10710 |
| Tutujy tarapdaky signal moduly | QCSM-08G | 7.Y00478 | 380V | 30A | 3108A22-23P② | 1.Y10711 |
| Robotyň gapdal signal moduly | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Robotyň gapdal signal moduly | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Robotyň gapdal signal moduly | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Robotyň gapdal signal moduly | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Tutujy tarapdaky signal moduly | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Tutujy tarapdaky signal moduly | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Robotyň gapdal signal moduly | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Robotyň gapdal signal moduly | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Tutujy tarapdaky signal moduly | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Tutujy tarapdaky signal moduly | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Tutujy tarapdaky signal moduly | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Tutujy tarapdaky signal moduly | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Robotyň gapdal signal moduly | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S② | 1.Y13392 |
| Robotyň gapdal signal moduly | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S② | 1.Y13393 |
| Tutujy tarapdaky signal moduly | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P② | 1.Y13394 |
| Tutujy tarapdaky signal moduly | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P② | 1.Y13395 |
①Kabeliň uzynlygy 1 metr ②Diňe birikýär, sim ýok
Pnewmatik Uzatma Moduly
| Önümiň ady | Model | PN | Gaz ýoly | Ýüzükli deşik |
| Robot tarapyndaky pnewmatik uzaldyş moduly | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Tutujy tarapdaky pnewmatik uzaldyş moduly | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Robot tarapyndaky pnewmatik uzaldyş moduly | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Tutujy tarapdaky pnewmatik uzaldyş moduly | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Robot tarapyndaky pnewmatik uzaldyş moduly | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Tutujy tarapdaky pnewmatik uzaldyş moduly | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Robot tarapyndaky pnewmatik uzaldyş moduly | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Tutujy tarapdaky pnewmatik uzaldyş moduly | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Robot tarapynyň öz-özüni Pnewmatik Uzatma Moduly diýip atlandyran | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Gripper tarapy öz-özüni Pnewmatik Uzatma Moduly diýip atlandyrdy | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Robot tarapyndaky pnewmatik uzaldyş moduly | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Tutujy tarapdaky pnewmatik uzaldyş moduly | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Ýokary ýygylykly modul görnüşi
| Önümiň ady | Model | PN | Iş woltažy | Işleýän tok |
| Robot tarapyndaky signal moduly | QCHFM-E14-C1R | 7.Y02003 | 1.4KV | 5A |
| Tutujy tarapdaky signal moduly | QCHFM-E14-C1G | 7.Y02004 | 1.4KV | 5A |
Signal Moduly (tor kabeli interfeýsi)
| Önümiň ady | Model | PN |
| Robotyň gapdal signal moduly | QCSM-RJ45-06R | 7.Y02007 |
| Tutujy tarapdaky signal moduly | QCSM-RJ45-06G | 7.Y02008 |
Servo Güýç Moduly
| Önümiň ady | Model | PN |
| Robot tarapyndaky servo güýç moduly | QCSM-08R1 | 7.Y02080 |
| Tutujy tarapdaky servo güýç moduly | QCSM-08G1 | 7.Y02081 |
Servo signal moduly
| Önümiň ady | Model | PN |
| Robot tarapyndaky servo signal moduly | QCSM-12R | 7.Y02082 |
| Tutujy tarapdaky servo signal moduly | QCSM-12G | 7.Y02083 |
Öz-özüni ýapýan suwuklyk howa moduly
| Önümiň ady | Model | PN |
| Robotyň gapdal signal moduly | QCWM-02R | 7.Y02049 |
| Tutujy tarapdaky signal moduly | QCWM-02G | 7.Y02050 |
Biziň işimiz


Önümleriň kategoriýalary
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER PGE SERIÝASY –...
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER PGE SERIÝASY –...
-

ÇALT ÇALŞYRYJY SERIÝA – QCA-S100 A Çalt Ç...
-

ÇALT ÇALŞYRYJY SERIÝA – QCA-25 Çalt Çalş...
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER AG SERIÝASY – ...
-

DH ROBOTICS SERVO ELEKTRIK GRIPPER RGI SERIÝASY –...