Robot golly robot gollanmasy Senagat derejeli alty okly bilelikdäki işleme we palletleşdirme işleme roboty


Esasy kategoriýa
AGV AMR / AGV awtomatik dolandyrylýan ulag / AMR awtonom ykjam robot / AMR robot üýşüriji / Senagat materiallaryny gaýtadan işlemek üçin AMR awtoulag / lazer SLAM kiçi üýşüriji awtomatik forklift / ammar AMR / AMR lazer SLAM nawigasiýasy / AGV AMR ykjam robot / AGV AMR şassi lazer SLAM nawigasiýasy / adamsyz awtonom forklift / ammar AMR pallet üýşüriji
Programma

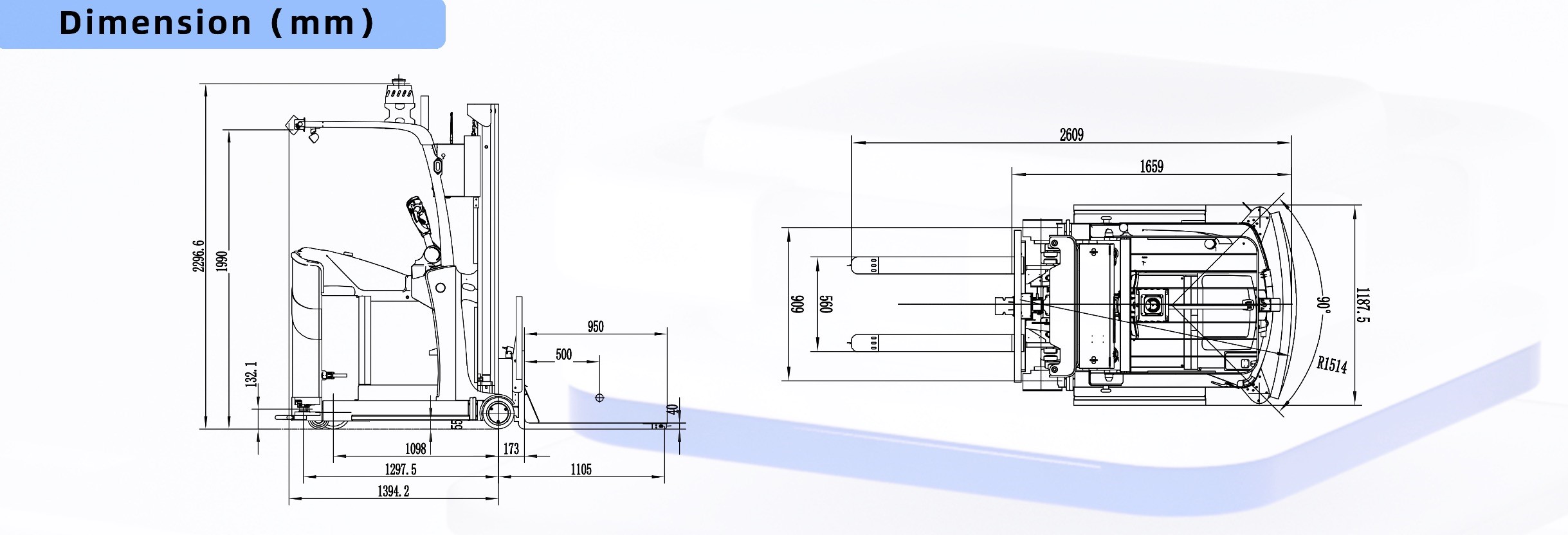
SFL-CPD15-T ammar göteriji ýük awtoulagy SEER tarapyndan işlenip düzülen gurlan SRC seriýaly dolandyryjy bilen üpjün edilen. Ol lazer SLAM nawigasiýasyny ulanmak arkaly şöhlelendirijilersiz aňsatlyk bilen ýerleşdirilip bilner, pallet identifikasiýa sensory arkaly takyk alnyp bilner, dispetçer ulgamyna bökdençsiz birikdirilip bilner. Bu awtomatik ammar forklift ýük awtoulagy zawodda harytlaryň daşalmagy, üst-üste goýulmagy we palletleşdirilmegi üçin iň gowy geçirilýän ammar göteriji maşyndyr.
El bilen işleýän senagat proseslerinde rewolýusiýa döretmek üçin döredilen öňdebaryjy çözgüt bolan Robot Goly Robot El bilen işleýän senagat alty okly hyzmatdaşlykly işleme we palletleşdirme roboty bilen tanyşdyrýarys. Bu ýokary derejede ösen robot gol işleme we palletleşdirme amallaryny kemsiz optimizirlemek üçin takyklygy, çeýeligi we netijeliligi özünde jemleýär.
Alty okly hyzmatdaşlyk dizaýny bilen bu dolandyryş roboty deňsiz-taýsyz hereketliligi we uýgunlaşmany hödürleýär, bu bolsa ony islendik senagat gurşawyna ajaýyp goşmaça edýär. Önümçilikde, logistikada ýa-da ammarda işleýän bolsaňyzam, bu robot dürli işleri, zatlary saýlamakdan we ýerleşdirmekden başlap, agyr zatlary palletlere ýerleşdirmäge çenli ajaýyp takyklyk bilen aňsatlyk bilen ýerine ýetirip bilýär.
Robot goly iň täze sensorlar we ösen dolandyryş ulgamlary bilen üpjün edilen bolup, ol hemişe iň gowy öndürijiligi we howpsuzlygy üpjün edýär. Bilelikdäki aýratynlyklar robotlara saglygyna zyýan ýetirmezden, öndürijiligi ýokarlandyrmazdan we sazlaşykly iş gurşawyny üpjün etmezden, adam operatorlary bilen bilelikde işlemäge mümkinçilik berýär.
Robotyň senagat derejeli gurluşy, hatda iň kyn iş şertlerinde hem uzak möhletli berkligi kepillendirýär. Onuň güýçli hereketlendirijisi we berk mehaniki gurluşy agyr ýükleri aňsatlyk bilen götermäge mümkinçilik berýär, iş ýerinde şikeslenmeleriň töwekgelçiligini ep-esli azaldýar we umumy netijeliligi ýokarlandyrýar.
Bu dolandyryş robotynyň ajaýyp aýratynlyklarynyň biri onuň intuitiw el bilen dolandyryş ulgamydyr. Operatorlar roboty ulanyjy üçin amatly interfeýs arkaly aňsatlyk bilen dolandyryp bilýärler, bu bolsa takyk hereketleri we sazlamalary amala aşyrmaga mümkinçilik berýär. Bu intuitiw dolandyryş ulgamy minimal okuw talaplaryny üpjün edýär, operatorlara robotyň işine çalt uýgunlaşmaga mümkinçilik berýär, netijede iş wagtynyň azalmagyna we umumy öndürijiligiň ýokarlanmagyna mümkinçilik berýär.
Mundan başga-da, işleýän robot dürli gutarnykly effektorlar bilen utgaşyklydyr we bar bolan iş akymlaryna aňsatlyk bilen goşulyp bilner, bu bolsa ony tygşytly maýa goýuma öwürýär. Onuň dürli işlere uýgunlaşmak we beýleki enjamlar bilen sazlaşykly işlemek ukyby islendik senagat operasiýasyna jedelsiz gymmatlyk getirýär.
Umuman alanyňda, Robotik Gol Roboty El bilen işleýän senagat alty okly hyzmatdaşlykly işleme we palletleşdirme roboty el bilen işleýän senagat proseslerini optimizirlemek üçin ajaýyp çözgütdir. Takyklygy, çeýeligi we netijeliligi bilen önümçiligi, howpsuzlygy ýokarlandyrmaga we ahyrsoňy girdejini iň ýokary derejä çykarmaga kepil geçilýär. Bu iň täze robot goly bilen senagat awtomatlaşdyryşynyň täze döwrüne gabat geliň.
Aýratynlyk

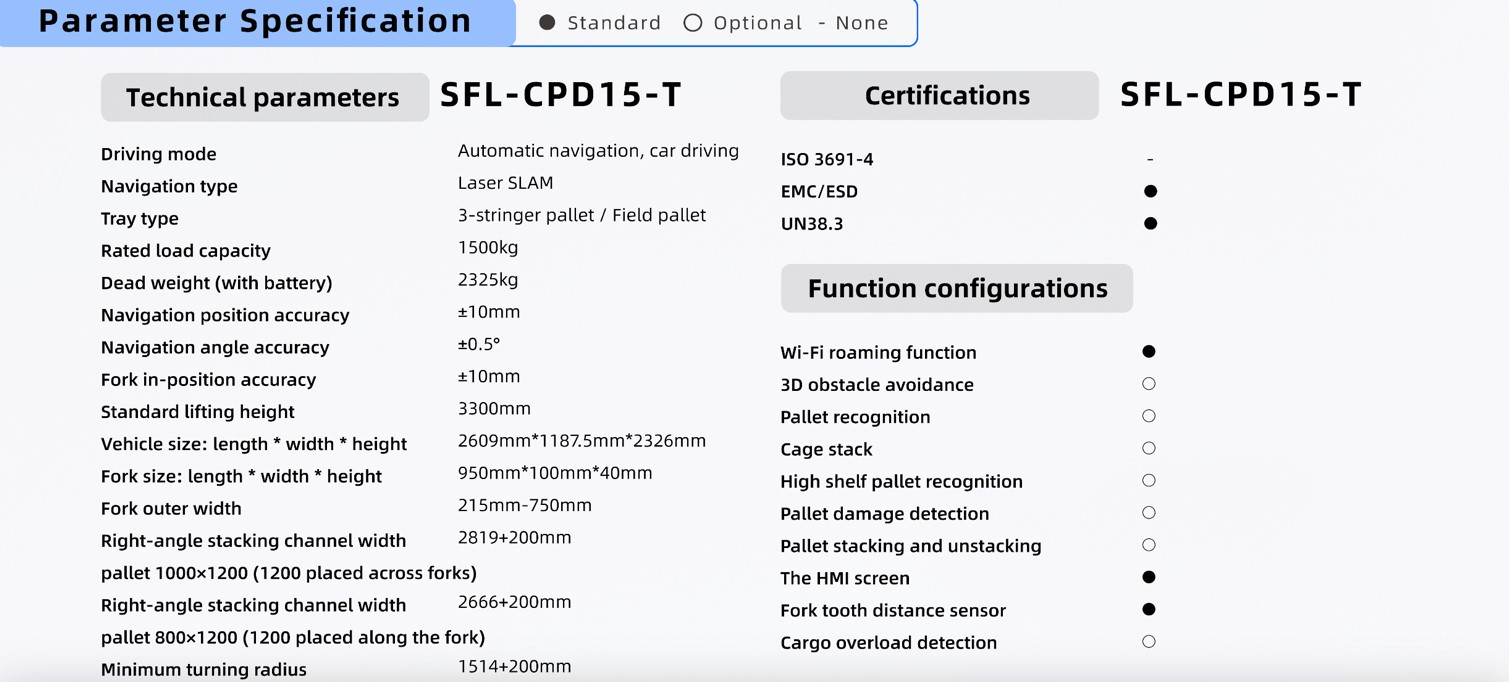
·bellenen ýük göterijiligi: 1500kg
·Nawigasiýa pozisiýasynyň takyklygy: ±10 mm
· göteriji beýiklik: 3300 mm
·minimum öwrülme radiusy: 1514 + 200 mm
●Hakyky lazer SLAM nawigasiýasy
Reflektorlarsyz ýolsuz ýol nawigasiýasy ony amala aşyrmagy hakykatdanam amatly edýär.
●Ýokary takyklykly tanamak
Paletany kesgitlemek, torlary kesgitlemek we harytlary takyk çatallamak – hem netijeli, hem howpsuz.
●1.5T ýük göterijilik
1,5 tonna ýük bilen daşaýan harytlar;
Nokadyň takyklygyny gaýtalaň: ±10 mm we ±0.5°.
●Çeýe göçmek we tertiplemek
Dar geçelgeler üçin inçe dizaýn we kiçi aýlanma radiusy; bökdençsiz giriş üçin çeýe tertip.
●Ähli taraplaýyn gorag ony hakykatdanam howpsuz edýär
Päsgelçiliklerden gaça durmak üçin lazer, aralyk datçigi, 360° 3D kamera tekizligi + baş giňişliginden gorag we köp ölçegli gorag.
●Ajaýyp ulanylyş
Dyrmaşmakda, dag gerişlerinden geçmekde, liftlerden geçmekde, daşamakda we üst-üste goýmakda ussat.
Baglanyşykly önümler



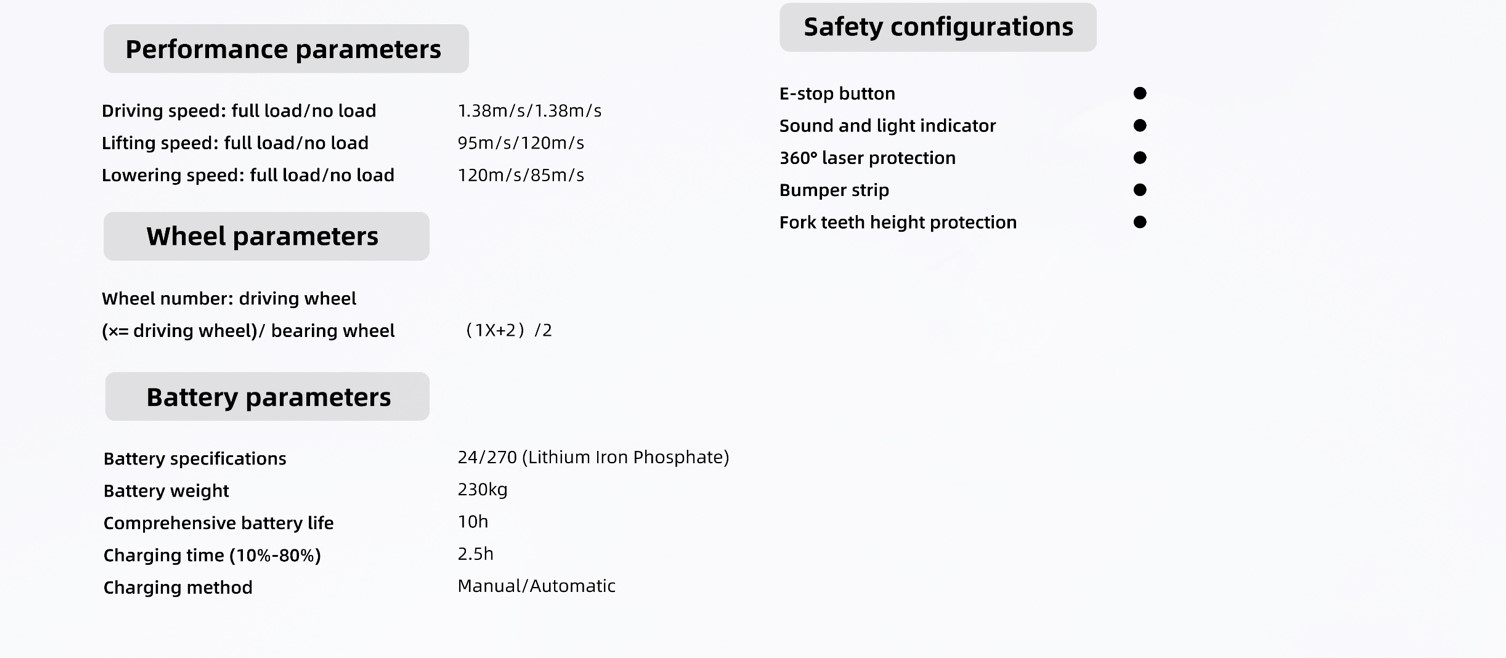
Spesifikasiýa parametri
Biziň işimiz


Önümleriň kategoriýalary
-

6 okly hyzmatdaşlyk roboty el bilen işleýän robot...
-

2020-nji ýylyň iň meşhur önümi Hitbot Z-Arm2140c iň ýokary ýük ...
-

Surat üçin sorujy tutujyly 4 okly Scara roboty...
-
Zawod Bahasyny Berýän Manipulýatorlar Robotik 4 Balta...
-

6 okly Dof senagat kebşirleýji robot golunyň bahasy ...
-

2022 Arzan Bahaly Hyzmatdaşlyk Awtomatiki Robot Gol...